杨小袁1艾伦·斯特拉勒1埃里克·布里森2
1. 波士顿大学地理与环境学系
2. 波士顿大学科学计算与可视化小组
介绍

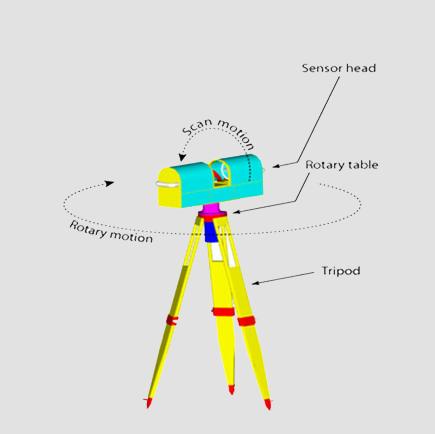
Echidna®验证仪器(EVI)的原型由澳大利亚CSIRO制造,是一种向上扫描的近红外激光雷达。EVI使用半半球扫描,二极管泵浦固态1064 nm Nd:YAG激光器。一个光电二极管将沿着每个激光脉冲路径从物体反射的能量数字化,以提供一个“波形”,将反射激光能量的强度描绘为时间和距离的函数。单次半球形EVI扫描可以从水平(横断面)视图获取树干大小和位置信息,从近垂直视图获取树木高度和树冠结构信息,从中间扫描角度获取树干形状、锥度和分支结构信息。
数据采集
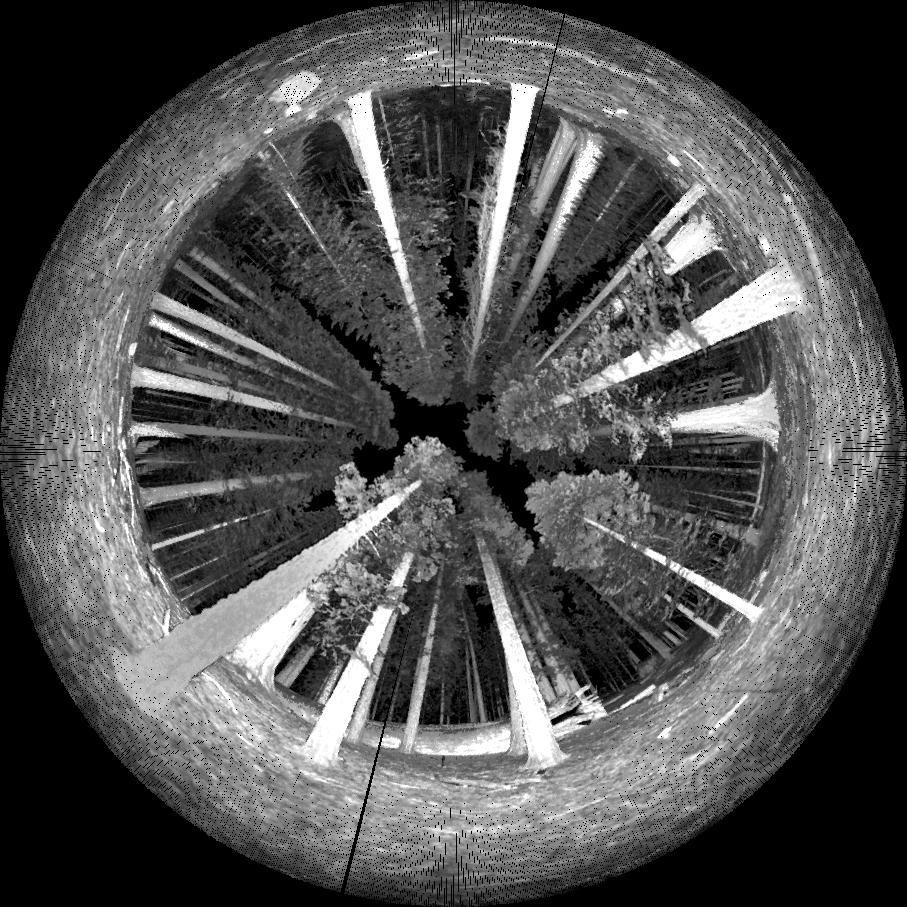
我们在加利福尼亚州塞拉国家森林的红杉,白杉和几种大型红杉占主导地位的地点获得了针鼹®冠下半球形激光雷达扫描,作为美国宇航局支持的澳门威尼斯人注册网站研究资助的一部分,以测试仪器通过远程测量检索森林结构的能力。在33.3米× 33.3米正方形的中心和四角附近获得5个EVI扫描,通过罗盘方位角和胶带距离记录扫描的相对位置。

点云体积
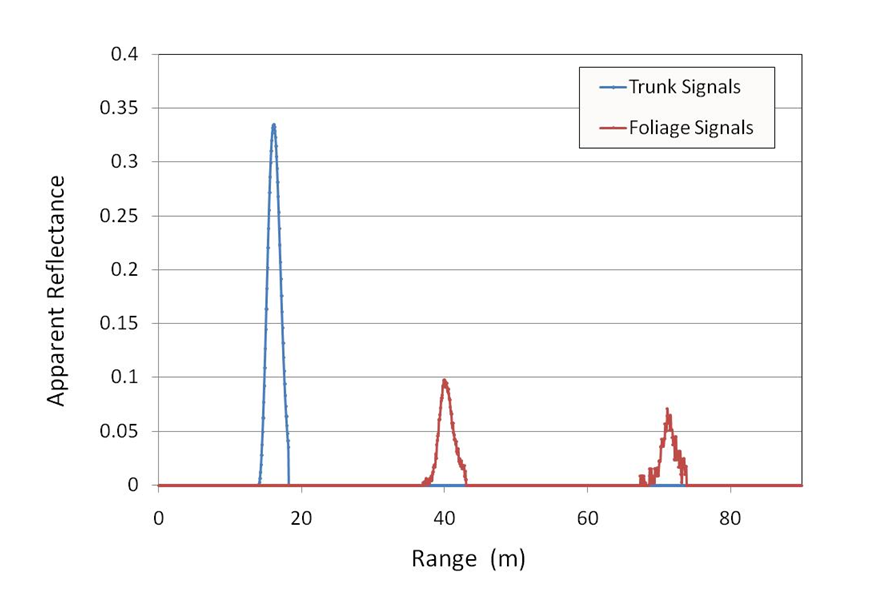
峰值强度及其在每个波形中的位置用于填充矩形坐标空间中的三维网格体,以形成五次激光雷达扫描中的每一次点云数据集。考虑到一些树叶或树枝在一次扫描中总是被其他树叶或树枝隐藏,并且局部地形效应也会在一次扫描中掩盖森林的部分,我们注册了五次扫描中点云的重叠部分。然后,结合的点云数据集将森林重建为中心体内的三维点云。

材料分类
用从完整波形数据中提取的信息(如每个峰值的强度和宽度)标记这些点,可以识别和分离大型实体体(如树干和树枝)和更细小、更分散的体积(如树叶)。

表面重建
我们还在开发形状提取软件,进一步分析点云数据集,构建三维“树物”重建,提供重要林业冠层参数的直接量化估计,如木材生物量、叶面积体积、树木直径和高度的结构测量。此外,叶片体积的大小、形状和位置可以用来测量和模拟冠内和冠间的聚集和间隙结构。这项工作还可用于校准大尺度机载激光雷达数据,从而为碳平衡建模等环境评估提供更大地理区域的结构测绘。


致谢
这项澳门威尼斯人注册网站研究由美国国家航空航天局(NASA)拨款ng - 0gg192g支持。