自动驾驶汽车的新领域
Goyal澳门威尼斯人注册网站研究团队打破常规,开发为现实世界设计的新型3D成像方法
大多数自动驾驶汽车都使用激光雷达,它通过在视野中创建场景的3D表示来模拟周围的世界。照片由John D. SL/Shutterstock提供
莫林·斯坦顿,CISE
2005年美国国防部高级澳门威尼斯人注册网站研究计划局(DARPA)大挑战赛(Grand Challenge)产生的最有前途的发展之一是在自动驾驶汽车(也称为自动驾驶汽车(AVs))中使用激光雷达技术。激光雷达是“光探测和测距”的缩写,是大多数自动驾驶汽车的关键部件,它使自动驾驶汽车能够探测物体和距离,从而模拟周围的世界。随着主要汽车制造商和大型科技公司竞相开发无人驾驶汽车,全球激光雷达自动驾驶汽车市场已经爆发,分析师预计到2027年市场价值将达到32.1亿美元。
随着自动驾驶汽车从实验性试驾到在公共道路上“野外”部署的距离越来越近,当今多光子激光雷达系统的局限性也越来越明显。由Vivek Goyal教授(ECE)领导的工程学院的BU CISE澳门威尼斯人注册网站研究分支机构一直在推进一种称为单光子激光雷达(SPL)的新兴技术的能力。SPL提供了更有利于自主导航要求的性能特征,如光子效率、眼睛安全、远距离成像能力。在2014年发表在《科学》杂志上的一篇论文中,Goyal利用脉冲激光和时间分辨光子探测器,在极低的光照水平(每像素检测到一个光子)下建立了深度成像领域。去年,欧洲经委会学生Charles Saunders、前博士后John Murray-Bruce和Goyal在《自然》杂志上发表了一篇论文,描述了一种非视距成像技术。该技术使用普通的数码相机来捕捉彩色图像,尽管没有深度信息,并且需要事先知道隐藏遮挡物体的形状。现在,Goyal、他的学生和澳门威尼斯人注册网站研究合作者在Optics Express、Optica和Nature Communications上发表了一系列开创性的论文,旨在实现SPL的更实际的应用,使无人驾驶汽车等应用的现实实现更接近现实。

“对我的团队来说,单光子激光雷达一直是一个令人兴奋的重点领域,”Goyal教授说。“对于从单个检测到的光子中可以收集到多少信息,纯粹的求知好奇心激发了我们了解激光雷达硬件的内部工作原理和局限性。这种努力带来了在现实环境中提供实质性改进的方法,这是非常令人欣慰的。”
通过激光雷达模拟世界
激光雷达允许自动驾驶汽车通过将脉冲激光照射到目标上并测量返回传感器的往返距离来模拟周围的世界。这些模型被称为“深度图”,就像照片一样;不同之处在于,每个像素不仅代表一个亮度,而且还指定了图像的这一部分与用于捕捉场景的相机之间的距离。对于自动驾驶汽车来说,深度图提供了视野中场景的3D表示,允许车辆“看到”物体有多近和多远。单光子激光雷达正在成为形成快速和精确的深度图的首选方法。传统的激光雷达需要每像素数百或数千个光子探测才能形成精确的3D图像,而SPL系统可以通过每像素一个光子探测来显示精确的图像。尽管如此,大多数SPL系统仍然局限于实验室规模的条件,而不是部署在现实世界的环境中。
提高自动驾驶汽车的安全性
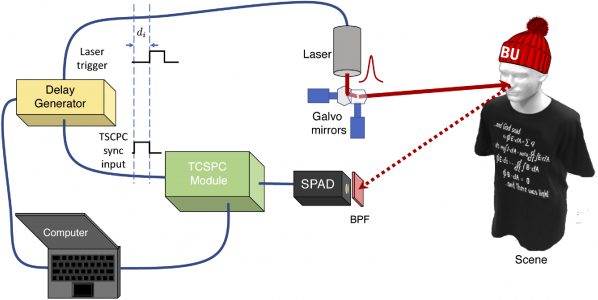
无人驾驶汽车可以在各种各样的环境中运行,因此需要能够快速准确地对意外物体和具有挑战性的情况做出反应。传统的光子检测时间模型会极大地限制数据采集能力,导致距离估计失真,并可能导致不安全的自动驾驶场景。在Optica和Optics Express中,波士顿大学校友Joshua Rapp (ECE ' 20博士)和Goyal描述了扩展传统光子探测时间模型的两项发展,以解决具有挑战性的成像场景和非理想采集设备的影响。
Rapp解释说:“快速、安全地形成深度地图是自动驾驶汽车面临的一个关键挑战,但仅靠硬件很难解决这个问题。”“我们真的需要了解影响每个光子探测的因素,并利用这些信息,以便在短时间内用很少的光进行准确的深度测量。我们这两篇论文的目标是表明,针对非理想硬件进行精心的数学建模和信号处理,可能会产生比标准方法更好的非常规测量策略。”
发展1:减少高通量光子的死时间
在Optica发表的题为“高通量单光子激光雷达”的论文中,Goyal和Rapp与前波士顿大学博士后马彦廷和德雷珀实验室合作,解决了当前仪器的死区效应,这限制了快速数据采集。他们描述了当今探测器技术的物理电子限制如何在明亮和黑暗物体混合时扭曲图像并产生无效的距离估计。例如,如果自动驾驶汽车的视野范围还包括靠近汽车的反光道路标志,那么自动驾驶汽车可能不一定会检测到路边的一辆坏掉的黑色汽车。这是因为每当检测到一个光子时,常用的单光子雪崩二极管(SPAD)阵列就会关闭复位。尽管在这些死时间内,测量设置对明亮的反光路标给出了无偏估计,但也会导致较暗的物体几乎看不到,从而导致危险的驾驶场景。
为了克服这种硬件限制,澳门威尼斯人注册网站研究人员建立了一种新的方法来模拟光子探测时间的绝对序列,即马尔可夫链。实验结果表明,在高通量测量中,正确补偿死区可以使数据采集时间减少100倍。通过更准确、更快地检测物体和距离,这种方法可以实现更安全的实时自动驾驶。
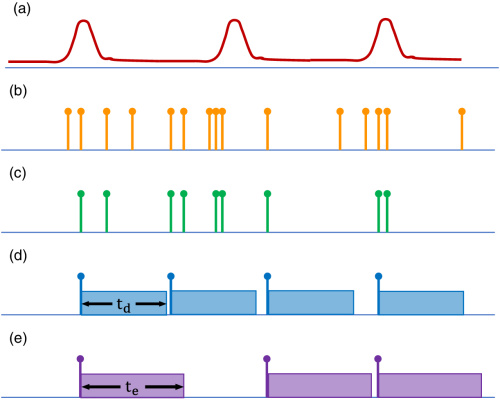
发展2:使精度超出传感器的定时分辨率
想象一下,和尤塞恩·博尔特(Usain Bolt)一起执法100米短跑,但只有一个秒表,以秒为单位记录时间。你只能说博尔特在比赛中跑了9到10秒,但不能再精确了。现在想象一下,你有10个秒表,每个秒表仍然只有1秒的分辨率。然而,通过按顺序启动每个秒表,每次启动之间延迟十分之一秒,您可以巧妙地将比赛的十个独立测量结合起来,以获得亚秒级的分辨率。
虽然光速比地球上最快的人类速度快得多,但用粗糙的时钟给光子计时也可以遵循同样的原理。今天的SPAD阵列探测器承诺快速深度成像,但以牺牲时间分辨率为代价换取更高的像像数。这限制了距离估计的精度。
在光学快报题为“抖动深度成像”的论文中,Goyal和Rapp与Draper实验室合作,解决了如何克服这一硬件限制。他们描述了一种减抖动激光雷达的实现,它使用改变同步延迟来改变光子定时电路的开始时间。然后,他们展示了这种新方法,结合对激光脉冲形状的仔细建模,优于基于传统假设的方法。澳门威尼斯人注册网站研究人员提出,由此产生的抖动激光雷达架构可用于设计SPAD阵列探测器,该探测器可以在粗糙的定时系统下形成精确的深度估计。
非视距成像边缘到现实
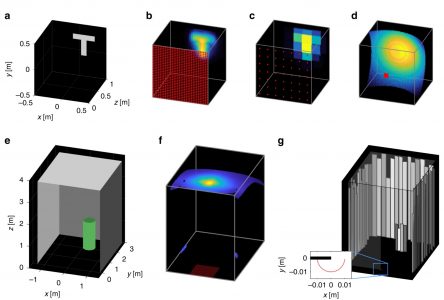
SPL有可能形成隐藏在我们直接视野之外的物体的图像。这一不断发展的澳门威尼斯人注册网站研究领域被称为“非视距成像”(NLOS),通过预测甚至超越人类驾驶员能力的障碍物,在帮助提高无人驾驶汽车的安全性方面具有巨大的潜力。虽然以前已经提出了一些NLOS成像方法,但这些发展的实际应用有限。通常情况下,它们需要激光扫描一大片平坦的墙壁,这在实际环境中并不总是可用的。重建的图像往往具有较小的视场,需要大量的测量。在自动导航成为现实之前,需要超越实验室规模实验的先进方法。
Goyal、Rapp、Saunders和Murray-Bruce与来自麻省理工学院德雷珀实验室和爱丁堡赫瑞瓦特大学的澳门威尼斯人注册网站研究人员合作,在《自然通讯》杂志上发表了题为“用边缘分辨率瞬变成像看到拐角”的论文,他们开发了一种新的非视线成像范例,这种方法更容易在现实环境中实现。澳门威尼斯人注册网站研究人员开发了一种SPL技术,通过向靠近垂直边缘的地板上的一小块区域(如门口的底角)发射激光,可以绘制出隐藏房间的大规模场景。在实验中,澳门威尼斯人注册网站研究人员展示了形成大型隐藏房间的2.5维图像的能力,每个维度长达3米,具有180度的视野。令人印象深刻的是,只需要45个测量位置,远远少于通常需要的数千个点。这项新工作利用了遮挡物体(在这种情况下是垂直边缘)是可见的这一事实,并使用光子探测的概率建模来改进计算方法。请听澳门威尼斯人注册网站研究人员在这里介绍这项工作。
自动驾驶汽车的安全和成功取决于它们对周围环境的实时准确映射和响应能力。本澳门威尼斯人注册网站研究证明了使用SPL方法以实用、高效的方法实现安全目标的可行性。虽然自动驾驶汽车是激光雷达发展的主要推动力,但预计激光雷达的进步将影响越来越多的应用,包括机器人视觉、环境监测和军事侦察等。
澳门威尼斯人注册自动驾驶激光雷达信号处理技术的最新进展,请参阅由Rapp和Goyal共同撰写的《IEEE信号处理杂志》,题为《自动驾驶车辆的单光子激光雷达》。